[REVLib] Requires non-prerelease versions of SPARK and Servo Hub firmware v25.0.0 or higher
[SPARK] Java/C++: Moves to a more declarative approach for configuring devices
Adds SparkFlexConfig, SparkMaxConfig which includes settings for different aspects of each device
Adds configure() method to apply a config object's settings to one or more devices of the correct type
Adds configureAsync() to configure a device without blocking the program
Adds a configAccessor field to device classes for reading configuration parameters directly from the device
[SPARK] Java/C++: Adds better support for simulation
Moves away from REVPhysicsSim to offer better support for WPILib physics simulation instead
Revamps simulation GUI data, including brand new fields for auxiliary devices
Adds Sim classes for each auxiliary device, allowing for more thorough simulation in the WPILib injection style
Adds SparkSim.iterate() method which features simulated current limits, closed-loop control, and more
Adds SparkSimFaultManager for throwing simulated faults
[SPARK] Adds support for MAXMotion
Adds control types MAXMotionPositionControl and MAXMotionVelocityControl
Adds MAXMotionConfig. Only trapezoidal profile is available at this time.
MAXMotion is not a drop-in replacement for Smart Motion, as you will need to retune PID gains.
[SPARK] Improves experience with managing status signals from SPARK devices
Adds SignalsConfig to adjust signal periods and always on setting
Automatically enables relevant status frames if a signal is requested by the user
[Servo Hub] Java/C++: Adds initial support for Servo Hub
Follows the same paradigms used for SPARK
Includes basic simulation support for Servo Hub
[SPARK] Renames CANSparkFlex and CANSparkMax to SparkFlex and SparkMax respectively
[SPARK] Renames SparkPIDController to SparkClosedLoopController
[SPARK] Removes configuration parameter setter/getter methods. Use SparkBase.configure() and SparkBase.configAccessor instead.
[SPARK] Removes burnFlash() and restoreFactoryDefaults(). Use the ResetMode and PersistMode options in SparkBase.configure() instead.
[SPARK] Removes REVPhysicsSim in favor of new simulation system
[SPARK] Removes async mechanism for setting parameters by setting CAN timeout to 0 in favor of configureAsync()
[SPARK] Moves all SPARK related classes into a spark package in Java and namespace in C++
[SPARK] LabVIEW: Reworks entire VI palette
Improves organization of VI palette by separating VIs by configuration, device status, and utility
Moves towards increased usage of polymorphic VIs for easier navigation of the palette
[SPARK] Fixes issue where multiple setpoint commands would be sent when switching control types on a SPARK, resulting in the motor oscillating between the different setpoints
[SPARK] Deprecates kSmartMotion and kSmartVelocity control types in favor of kMAXMotionPositionControl and kMAXMotionVelocityControl respectively.
[SPARK] Deprecates SparkBase.setInverted() and SparkBase.getInverted() in favor of using the new configuration system
[SPARK] Updates ClosedLoopController.setReference() to use the ClosedLoopSlot enum instead of an int
[SPARK] Improves error description when attempting to persist parameters while the robot is enabled
[SPARK] Improves getting faults/warnings by returning a Faults or Warnings object
The raw bits of faults and warnings are available as a field in the respective struct
[SPARK] Adds hasActiveFault(), hasStickyFault(), hasActiveWarning(), and hasStickyWarning() to check if there is a fault/warning present at all on the SPARK device
[SPARK] Adds pauseFollowerMode() and resumeFollowerMode()
[SPARK] Adds ability for follower mode to work even if the follower is not referenced in user code
[SPARK] Adds support for specifying an absolute encoder's duty cycle start and end pulse widths in AbsoluteEncoderConfig
[SPARK] Adds configuration option for setting whether the absolute encoder is zero-centered
[REVLib] Fixes potential memory leaks in string handling
[SPARK] LabVIEW: Improves reliability of CAN transactions by adding a retry mechanism
Changes to C++ and Java
Increases the default timeout to wait for a periodic status from 2*framePeriodMs to 500ms.
Reduces possibility of large, inaccurate jumps in data occurring when retrieving from status frames.
Reduces amount of "timed out while waiting for periodic status X" errors in driver station.
Adds setPeriodicFrameTimeout() to configure the CAN timeout for periodic status frames. See code docs for more information.
Improves reliability of RTR CAN frames such as setting parameters and other commands that expect a response from the device.
Adds mechanism to retry requests if sending the request or receiving the response failed. The default value for maximum number of retries is 5.
Adds setCANMaxRetries() to configure the value for maximum number of retries. See code docs for more information.
Fixes undefined behavior when SPARK motor controller information cannot be retrieved during initialization.
Changes to Java
Fixes issue introduced in v2024.2.2 where calling getEncoder() multiple times can cause a fatal exception in certain circumstances.
Changes to C++ and Java
Removes dynamic check for SPARK model when calling getEncoder(), causing unnecessary CAN traffic.
Moves zero argument CANSparkBase.getEncoder() to CANSparkMax and CANSparkFlex subclasses to determine default encoder values.
Changes to C++ and Java
Fixes issue where configuring the velocity filter for the default relative encoder of a SPARK Flex would not set the correct parameters.
Changes to Java
Improves memory allocation performance.
Changes to C++ and Java
Changes behavior of SPARK Flex and MAX initialization errors to throw exceptions rather than terminating the robot program.
Fixes issue where initializing a SPARK Flex or MAX in brushed mode while the device is disconnected from the CAN bus causes the robot program to terminate.
Fixes issue where initializing a SPARK Flex or MAX in brushed mode causes robot simulation to terminate.
Fixes warning about using the wrong class for a SPARK Flex or MAX during robot simulation.
Changes to C++
Fixes ambiguous overload error when no parameters are supplied when calling GetAnalogSensor().
Fixes ambiguous overload error when no parameters are supplied when calling GetEncoder().
Official 2024 FRC kickoff release for REVLib, with full support for SPARK Flex. Requires WPILib 2024 and SPARK Flex/SPARK MAX firmware 24.x.x.
Changes to C++, Java, and LabVIEW
Throws an error if firmware version is less than 24.0.0
Throws an error if the motor type is set to Brushed on a SPARK Flex while a SPARK Flex Dock is not connected
Gets main encoder position with enhanced precision
Changes to C++ and Java
Sends a warning to the Driver Station if the wrong class is used for the type of SPARK that is connected
Adds CanSparkBase class that exposes functionality that is common to both the SPARK MAX and the SPARK Flex
Adds CanSparkFlex class that exposes all functionality of the SPARK Flex
CanSparkFlex has a getExternalEncoder() method that returns a SparkFlexExternalEncoder instead of a getAlternateEncoder() method that returns a SparkMaxAlternateEncoder.
This is because Alternate Encoder Mode is not necessary for SPARK Flex, and has been replaced by the External Encoder Data Port feature:
Can be used simultaneously with the internal encoders in NEO class motors
Can be used simultaneously with an absolute encoder and limit switches
Virtually no RPM limit
No special configuration
The following items have been deprecated in favor of new equivalents:
Instead of CANSparkMaxLowLevel, use CANSparkLowLevel
Instead of SparkMaxAbsoluteEncoder, use SparkAbsoluteEncoder
Instead of SparkMaxAnalogSensor, use SparkAnalogSensor
Instead of SparkMaxLimitSwitch, use SparkLimitSwitch
Instead of SparkMaxPIDController, use SparkPIDController
Instead of SparkMaxRelativeEncoder, use SparkRelativeEncoder
Instead of ExternalFollower.kFollowerSparkMax, use ExternalFollower.kFollowerSpark
The ExternalFollower enum can be accessed at CANSparkMax.ExternalFollower, CANSparkFlex.ExternalFollower, or CANSparkBase.ExternalFollower
Adds a CANSparkBase.getSparkModel() method that returns a SparkModel enum
Changes to LabVIEW
Deprecates old VIs that are prefixed with "Spark MAX" and replaces them with VIs prefixed with "SPARK"
Deprecated icons are "grayed out"
Help context (documentation) for deprecated VIs point the user to the equivalent new VI
New icons say "SPARK" instead of "REV MAX"
Adds SPARK Get Model.vi
Fixes SPARK Get Analog Sensor Voltage.vi when used with a SPARK Flex
Updates SPARK Get I Accum.vi to get I Accum from status 7 instead of status 2
Updates "Alternate Encoder" VIs to be "Alternate or External Encoder"
Only throw the data port config warnings when the device is a SPARK MAX
This version of REVLib requires SPARK MAX Firmware v1.6.3. Please update your SPARK MAX through the REV Hardware Client.
Improves documentation for the setZeroOffset() and getZeroOffset() methods on Absolute Encoder objects
Fixes issue where reading an absolute encoder’s zero offset could return an incorrect value in certain conditions
This version of REVLib requires SPARK MAX Firmware v1.6.2. Please update your SPARK MAX through the REV Hardware Client.
Adds support to configure the hall sensor's velocity measurement
C++/Java: Updates SetMeasurementPeriod() and SetAverageDepth() in the SparkMaxRelativeEncoder class to be used when the relative encoder is configured to be of type kHallSensor.
LabVIEW: Adds SPARK MAX Configure Hall Sensor.vi and SPARK MAX Get Hall Sensor Config.vi to set and get the hall sensor's measurement period and average depth.
Adds support for WPILib 2023
Adds support for using a duty cycle absolute encoder as a feedback device for the SPARK MAX
C++/Java: Adds SparkMaxAbsoluteEncoder class
LabVIEW: Adds VIs for configuring and getting the values from a duty cycle absolute encoder
Adds Position PID Wrapping to allow continuous input for the SPARK MAX PID controller
C++/Java: Adds PositionPIDWrapping methods to the SparkMaxPIDController class
LabVIEW: Adds VIs for setting and getting the Position PID Wrapping configuration
Allows configuring the periodic frame rates for status frames 4-6
Breaking Changes
LabVIEW: The version of NI Package Manager bundled with the FRC LabVIEW offline installer will no longer work when installing the REVLib package. NIPM must be updated to the latest version or installed from the FRC LabVIEW online installer to be able to install this package of REVLib for LabVIEW
Breaking changes
C++/Java: CANError has been renamed to REVLibError.
Java: ColorMatch.makeColor() and the ColorShim class have been removed. Use the WPILib Color class instead.
C++/Java: Deleted deprecated constructors, methods, and types
Replace deprecated constructors with CANSparkMax.getX() functions.
Replace CANEncoder.getCPR() with getCountsPerRevolution().
Remove all usages of CANDigitalInput.LimitSwitch.
Replace CANSparkMax.getAlternateEncoder() with CANSparkMax.getAlternateEncoder(int countsPerRev).
Remove all usages of CANSparkMax.setMotorType(). You can only set the motor type in the constructor now.
Replace SparkMax with PWMSparkMax, which is built into WPILib.
Java: CANSparkMax.get() now returns the velocity setpoint set by set(double speed) rather than the actual velocity, in accordance with the WPILib MotorController API contract.
C++/Java: CANPIDController.getSmartMotionAccelStrategy() now returns SparkMaxPIDController.AccelStrategy.
C++/Java: Trying to do the following things will now throw an exception:
Creating a CANSparkMax object for a device that already has one
Specifying an incorrect countsPerRev value for a NEO hall sensor
Java: Calling a CANSparkMax.getX() method using different settings than were used previously in the program
Java: Trying to use a CANSparkMax (or another object retrieved from it) after close() has been called
C++: Calling a CANSparkMax.getX() method more than once for a single device
C++/Java: Deprecated classes in favor of renamed versions
C++ users will get cannot declare field to be of abstract type errors until they replace their object declarations with ones for the new classes. Java users will be able to continue to use the old classes through the 2022 season.
AlternateEncoderType is replaced by SparkMaxAlternateEncoder.Type.
CANAnalog is replaced by SparkMaxAnalogSensor.
CANDigitalInput is replaced by SparkMaxLimitSwitch.
Java: CANEncoder is replaced by RelativeEncoder.
C++: CANEncoder is replaced by SparkMaxRelativeEncoderandSparkMaxAlternateEncoder`.
CANPIDController is replaced by SparkMaxPIDController.
CANSensor is replaced by MotorFeedbackSensor.
ControlType is replaced by CANSparkMax.ControlType.
EncoderType is replaced by SparkMaxRelativeEncoder.Type.
Enhancements:
C++/Java: Added the ability to set the rate of periodic frame 3
Fixes:
C++/Java: CANSparkMax.getMotorType() no longer uses the Get Parameter API, which means that it is safe to call frequently
Java: The CANSparkMax.getX() methods no longer create a new object on every call
Known issues:
SparkMaxPIDController.setIAccum() only works while the control mode is active
Below you will find information on how to download and install REVLib for LabVIEW, Java, and C++.
2025.0.0
Embedded (Press Ctrl-H)
2025.0.0
2025.0.0
Download the latest REVLib LabVIEW package from the download link above.
Make sure LabVIEW for FRC 2024 is installed and updated.
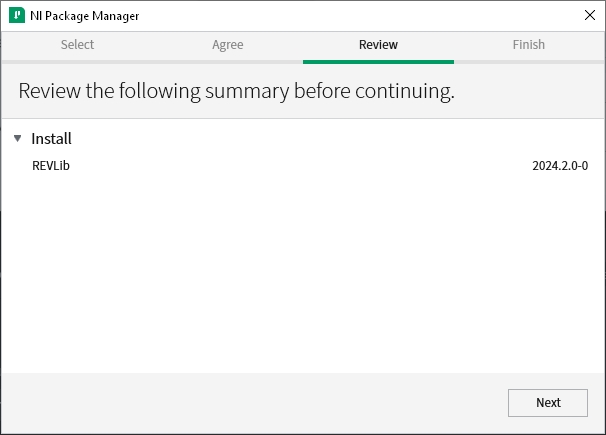
Open the REVLib LabVIEW Package. The NI Package Manager should automatically open.
Click Next:
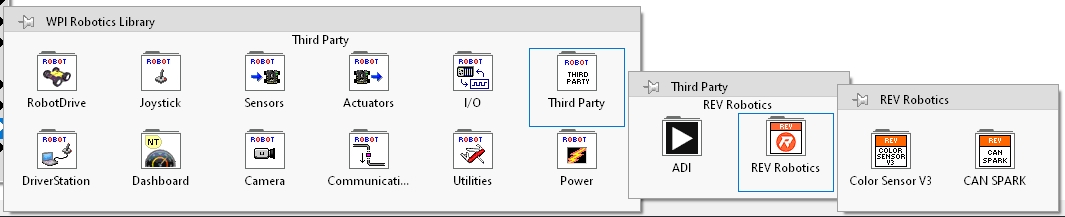
Once the installation is complete, you will be able to access the REVLib VIs at LabVIEW Functions Pallet -> WPI Robotics Library -> Third Party -> REV Robotics.
You can use the online method to install REVLib C++/Java if your development machine is connected to the internet:
Open your robot project in VSCode.
Click on the WPI icon in the corner to open the WPI Command Pallet.
Select Manage Vendor Libraries.
Select Install new library (online).
Enter the following installation URL and press ENTER:
Download and unzip the latest REVLib into the C:\Users\Public\wpilib\2025 directory on Windows and ~/wpilib/2025 directory on Unix-like systems.
Follow the WPILib instructions for Adding Offline Libraries.